Разработка модели поведения подключенного и беспилотного транспорта с учетом влияния окружающих объектов
В течении последних 10 лет сфера Интеллектуальных Транспортных Систем (ИТС) развивается необыкновенно быстро. Если 10 лет назад пределом мечтаний был автомобиль, оснащенный функцией круиз-контроля и антиблокировочной системой (ABS), то сейчас в базовых комплектациях автомобилей устанавливаются системы, которые автоматически удерживают автомобиль в полосе, автоматически тормозят, если впереди появляется препятствие, автоматически удерживают автомобиль при резком боковом ветре, и многое другое.
Технологии автоматизированной помощи водителю (ADAS) активно развиваются и выходят на новый уровень - полностью самоуправляемых транспортных средств. Множество автоконцернов, технологических компаний и стартапов сейчас занимаются разработкой беспилотных автомобилей. Одновременно, появляются технологии и стандарты в области телекоммуникаций, позволяющие обеспечить обмен информацией между транспортными средствами - так реализуется технология подключенного транспорта.
Беспилотный и подключенный транспорт - сложные технологии, так как их работа обусловливается взаимодействием с окружающей средой. Прежде чем данные технологии смогут полноценно использоваться на личном транспорте, они должны пройти верификацию и валидацию. Вопросы безопасности ограничивают возможности для тестирования данных технологий на дорогах общего пользования, а требования к разнообразию сценариев, в которых они должны быть протестированы, еще сильнее затрудняют этот процесс. Для его облегчения первичное тестирование проводится с помощью компьютерного моделирования.
О проекте
Целью проекта является разработка программного комплекса для моделирования транспортных потоков, который будет включать в себя: модель поведения беспилотных транспортных средств в транспортных потоках, модель распространения сигналов по беспроводным каналам связи подключенного транспорта с учетом влияния на них объектов окружающей среды, модель совместного восприятия объектов окружающей среды с подключенным беспилотным транспортом.
Применение
Данный проект предполагается использовать для более точного моделирования поведения подключенных и беспилотных транспортных средств, и оценки их влияния на дорожную безопасность, пропускную способность участков дорог и сокращение расходов энергии.
Заказчик проекта
Заказчиком проекта является МИЭМ.
План проекта
- Первым этапом проекта служит аналитическая работа:
- Изучение и создание информационной базы возможностей существующих инструментов (симуляторов и форматов описания сценариев) для моделирования исследуемых объектов
- Выбор симуляторов, на основе которых будет создаваться интегрированная среда моделирования;
- Поиск и выбор сценария дорожной ситуации и алгоритма совместного восприятия дорожной ситуации, подходящих для изучения поведения подключенного беспилотного транспорта и оценки точности моделей.
Вторым этапом проекта является изучение отобранных инструментов и разработка интегрированной среды моделирования: требуется установить модели на рабочую машину, настроить исполнительное окружение и разобраться, как с ними работать.
Третьим этапом необходимо провести моделирования определенных сценариев дорожного движения с заданными параметрами и характеристиками используемых транспортных средств. После этого необходимо модифицировать/доработать модель так, чтобы добавить возможность проведения моделирования с учетом влияния объектов окружающей среды.
Конечным этапом будет проведение моделирования выбранных сценариев дорожного движения с учетом влияния окружающих объектов, сравнить результаты моделирования с полученными ранее данными (откалибровать модель), доказать корректность работы программной модели. Эксперименты должны демонстрировать все внесенные изменения.
Полученные в результате работы над проектом модели предполагается использовать для более точного моделирования поведения подключенных и беспилотных транспортных средств и оценки их влияния на дорожную безопасность, пропускную способность участков дорог и сокращение расходов энергии.
В дальнейшем планируется продолжить проект и добавить возможность учета других объектов и параметров в моделях.
Текущая стадия проекта
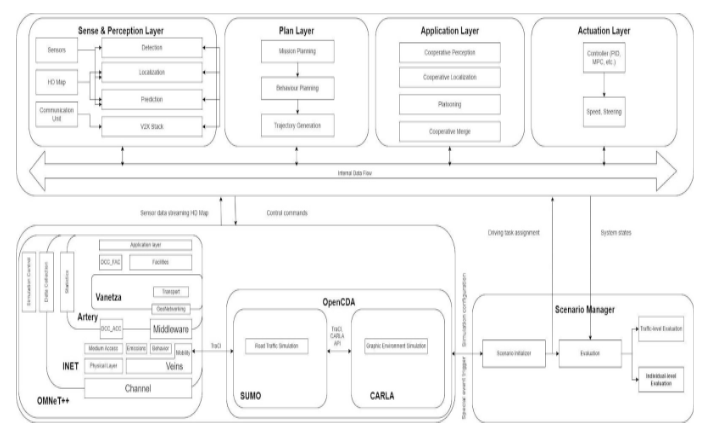
В настоящий момент проведен подробный анализ и сбор данных о более чем 30 инструментах для моделирования беспилотного транспорта, в числе которых Baidu Apollo, CARLA, AirSim, AutoWare, LGSVL Simulator. Закончена разработка архитектуры будущего приложения.
В качестве фреймворка используется фреймворк OpenCDA, который включает в себя CARLA + SUMO и подготовлен для прототипирования алгоритмов совместного восприятия.
К нему добавляется OpenCOOD - фреймворк для совместного восприятия, в котором уже реализованы многие алгоритмы, или библиотека coperception. Реализуется алгоритм SyncNet, который позволяет учитывать задержку в передаче данных между транспортными средствами.
Далее происходит установка фреймворка Artery для моделирования VANET-сетей по европейскому стандарту ETSI ITS-G5. Этот фреймворк включает в себя возможность получать информацию о местонахождении транспортных средств из SUMO и передавать их в OMNeT++. Необходимо подключить этот фреймворк к SUMO, который установлен вместе с OpenCDA. И использовать геометрическую детерминированную модель каналов связи GEMV2 - она уже включена в фреймворк Artery.
Для GEMV2 создается отдельная карта, повторяющая местность карты, выбранной в симуляторе CARLA (например, town03, town05, town06, town07, town10). Итоговая задача - данные о задержках в передаче данных из Artery передать в SyncNet.
Команда проекта:
Степанянц Виталий Гургенович, лидер проекта, исследователь
Андрончев Александр Дмитриевич, программист
Добжанский Егор Константинович, программист
Шабалин Егор Алексеевич, программист
Слобожанинова Марина Эдуардовна, стажер
Серов Арсений Алексеевич, стажер
Алешина Алиса Дмитриевна, стажер
Руководитель проекта

Департамент компьютерной инженерии: Доцент
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.