Система ДУ Роботом
В современном мире появляется все больше роботизированных систем, которые могут упростить работу в различных сферах, заменив человека. Роботизированные системы могут также применяться в ситуациях, где возможности человека ограничены, подвергается опасности его жизнь и здоровье.
Так, управляемые роботизированные системы могут использоваться при работе в космосе, под водой, на территориях, загрязненных радиацией или вредными химическими веществами, при экстремальных температурах, при военных действиях. Для этого роботизированная система должна обладать широкими функциональными возможностями. В подобных ситуациях часто возникает необходимость произвести работу наиболее быстро, а управление системой должно быть удобным.
Для повышения интуитивности управления роботизированными системами в нашем проекте используется носимая система из датчиков (акселерометры, гироскопы, датчики сгиба) для считывания движений человека. Полученная информация о движениях передается на управляемый объект, и он реагирует их в реальном времени в соответствии с командами API для преобразования движений человека в движения робота. В данном случае управление системой становится максимально интуитивным и оператор не тратит время на обдумывание движений.
Цель проекта:
Расширить возможности по дистанционному управлению роботизированными устройствами с использованием датчиков считывания движений человека.
Применение:
Сферы применения систем считывания движений человека включают в себя: управление роботизированными системами, которые могут использоваться в условиях, в которых затруднено или невозможно нахождение человека; обучение антропоморфных систем паттернам движений; анализ движений.
Пользователь:
Разрабатываемая система является прототипом для эргономичных систем считывания движений, основанных на получении информации с акселерометров и гироскопов. На данный момент нет подобных продуктов в низком и среднем ценовом диапазоне. Большинство систем считывания движений, используемых для управления роботами, представляют собой тяжелые носимые системы, состоящие из сочленений, повторяющих человеческий скелет.
Для создания Системы ДУ Роботом требуется решить следующие задачи:
- Разработка модели считывания движений и размещения плат и датчиков;
- Разработка эргономичных креплений датчиков носимой системы;
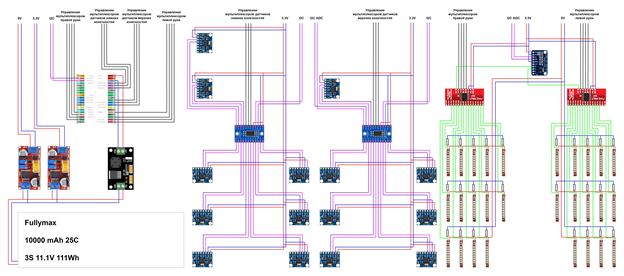
- Разработка электрической схемы для сбора данных и питания датчиков и платы;
- Разработка ПО: для определения начальных условий системы, интерпретации и преобразования данных с датчиков;
- Разработать API для передачи данных системы на управляемый объект (робота).
У использования для считывания движений человека системы из акселерометров и гироскопов есть несколько значительных преимуществ перед другими распространенными вариантами – системами фиксации движений с помощью камеры или множества дальномеров и носимыми системами, повторяющими скелет. Для использования первых двух типов необходимо внешнее считывающее оборудование, оператор системы и отдельные отслеживаемые точки должны находиться в прямой видимости. Поэтому для управления роботизированными системами используются носимые системы.
Преимуществами использования носимой системы из инерционных датчиков перед жестким скелетом являются: меньший вес и габариты системы, соответственно, повышение удобства ее транспортировки и использования; простота регулировки системы под операторов разного телосложения, модульность, позволяющая быстро заменить вышедшие из строя компоненты, низкая цена.
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.