- A
- A
- A
- АБB
- АБB
- АБB
- А
- А
- А
- А
- А
123458 г. Москва, Таллинская, д. 34 (м. «Строгино»)
Тел.: +7 (495) 772-95-90 * 11089
E-mail: vstarykh@hse.ru


Департамент компьютерной инженерии создан в 2015 г. в результате объединения кафедр «Информационно-коммуникационные технологии», «Вычислительные системы и сети», «Информационные технологии и автоматизированные системы» и базовой кафедры «Информационно-аналитических систем – ЕС-лизинг» факультета информационных технологий и вычислительной техники МИЭМ НИУ ВШЭ. Преподаватели департамента участвуют в подготовке бакалавров, магистров и аспирантов для самых востребованных и приоритетных направлений развития науки, технологий и техники в России, в частности: «Информатика и вычислительная техника» (бакалавриат), «Компьютерные системы и сети" (магистратура).
В печати
IOP Publishing, 2021.
Heliyon. 2020. Vol. 6. No. 7. P. 1-7.
Сластников С. А., Королев Д. А., Белов А. В.
В кн.: ЦИФРОВЫЕ ТЕХНОЛОГИИ В ИНЖЕНЕРНОМ ОБРАЗОВАНИИ: НОВЫЕ ТРЕНДЫ И ОПЫТ ВНЕДРЕНИЯ. М.: Московский государственный технический университет им. Н.Э. Баумана, 2020. С. 96-100.
123458 г. Москва, Таллинская, д. 34 (м. «Строгино»)
Тел.: +7 (495) 772-95-90 * 11089
E-mail: vstarykh@hse.ru

Итоги отборочного тура «InnovateFPGA 2019»
Всего в этом году на конкурс во всех регионах было подано 262 проекта. Из 61 проекта, размещенных в локации EMEA, зарегистрированы 10 проектов от Высшей школы экономики, подготовленные нашими ребятами. В результате серьезного отбора 7 проектов из Высшей школы экономики (МИЭМ) прошли в региональный финал. Это самое большое представительство среди всех вузов СНГ!
МИЭМ представляли следующие проекты, вышедшие в финал:
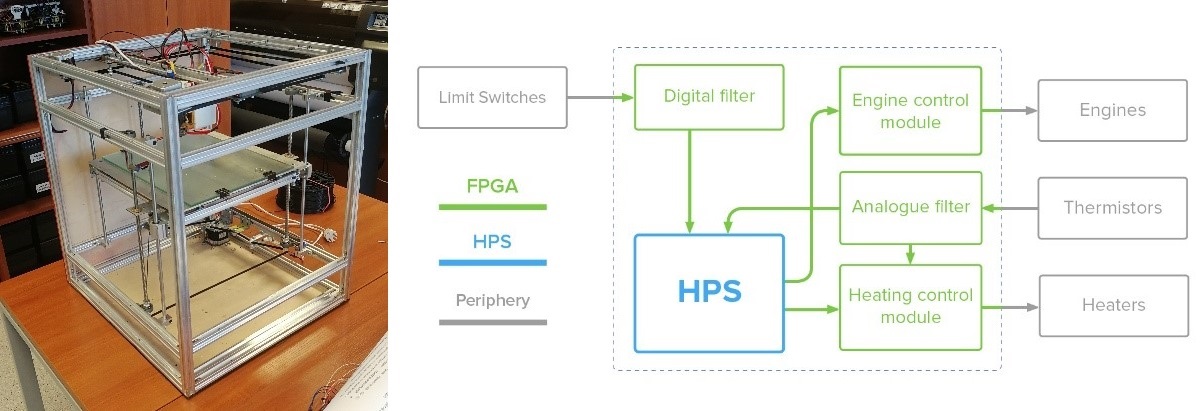
Умный 3D принтер на ПЛИС. Известно, что в современных 3D‑принтерах существуют такие ошибки, как отрыв модели от стола или разрыв пластиковой нити. Для отслеживания и предотвращения данных ошибок нужна помощь человека. Целью проекта является создание 3D‑принтера, который будет отслеживать и предотвращать сбои и проблемы во время печати автоматически. Также команда планирует обеспечить принтер удобным интерфейсом управления (ЖК-дисплей), изолированным корпусом и большой областью печати. Достигнута полная автономность принтера от компьютера: для печати принтеру необходима только модель в нужном формате на USB накопителе. Данная автономность была достигнута путем разработки специализированного ПО для ПЛИС, которое позволяет выполняет такие сложные задачи как слайсинг 3D модели, управление шаговыми двигателями, протяжкой, нагревом нити и пр. Для реализации своего проекта ребята выбрали плату DE10-Nano, которая была им предоставлена как региональным финалистам организаторами конкурса. А само участие в конкурсе является следствием проекта, выполненного на 3 курсе. Участники проекта: Зунин Владимир, Балгуданян Ишхан и Тарасевич Влад. Руководитель: Романов Александр.
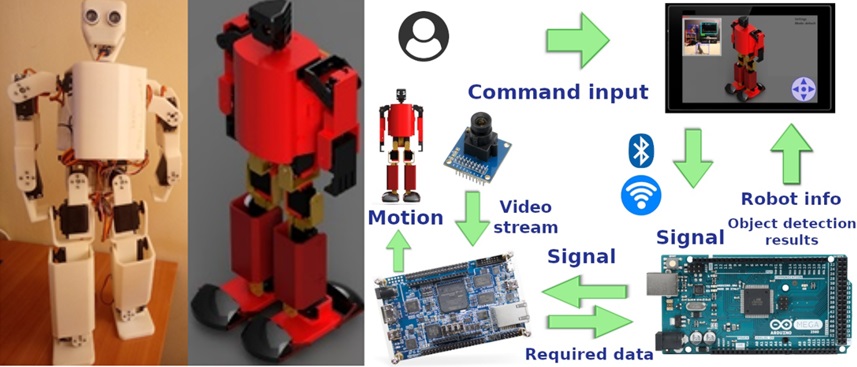
Антропоморфный робот. Целью данного проекта является создание антропоморфного робота. Данный робот может использоваться в роли помощника людям с ограничениями зрения для ориентации в пространстве; робота-экскурсовода, который будет рассказывать историю предметов, находящихся вблизи от него; робот-няня, который сможет следить за сном и дневной деятельностью ребенка во время отсутствия родителей; робота-компаньона, который сможет стать спутником человека и хорошим собеседником. Управление роботом осуществляется с помощью специального приложения по Wi-Fi или Bluetooth, не исключено, что робот будет также работать и в автономном режиме. Для управления многочисленными сервоприводами, сбора и обработки данных с датчиков, командой было принято решение использовать плату DE‑10 Nano. На данный момент разработан, и оптимизирован под размеры DE-10 Nano, корпус антропоморфного робота, разработана нейронная сеть, которая в дальнейшем планируется использоваться для распознавания образов. Ведутся работы над созданием синтезатора речи на ПЛИС. Участники проекта: Рзаев Эдвард, Ханаев Антон, Кандыба Никита. Руководители: Американов Александр и Лежнев Евгений.
Система нерокриптографии, основанная на использовании TPM сетей. Данный проект направлен на разработку аппаратной криптосистемы на основе TPM (Tree Parity Machine). TPM – это особая многослойная структура нейронной сети с прямой связью, использующая концепцию взаимного обучения для нейронной криптографии. Синхронизация двух TPM используется в качестве протокола обмена секретными ключами. Отправленная информация шифруется блочным шифром PRESENT. Преимуществами реализации FPGA TPM и PRESENT являются высокая скорость и низкое энергопотребление и потребление ресурсов. Данный проект является результатом ВКР на 4 курсе. Автор: Косолапова Виктория. Руководитель: Романов Александр.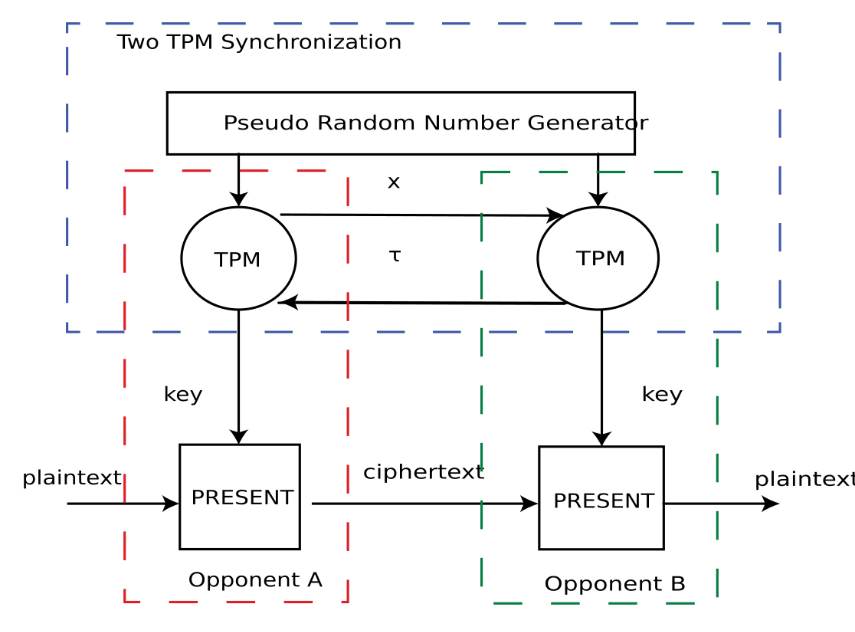
Система для мониторинга растений. Данная система способна автоматически выращивать растения. Целью проекта является автоматизированный уход за растениями, выращиваемых в теплице. Система контролирует климатические условия, такие как свет, влажность, температуру и т.д. С помощью разработанного веб-сайта пользователи могут устанавливать различные параметры и отслеживать растения в режиме реального времени. Уход за растениями осуществляет робот, перемещающийся на специальных рельсах. Для управления системой планируется использовать DE-10 Nano и Arduino. Авторы: Измайлова Лида (в настоящее время – студент 2-го курса бакалавриата!) и Владислав Соломенцев (МГТУ им. Н.Э. Баумана). Руководитель: Романов Александр.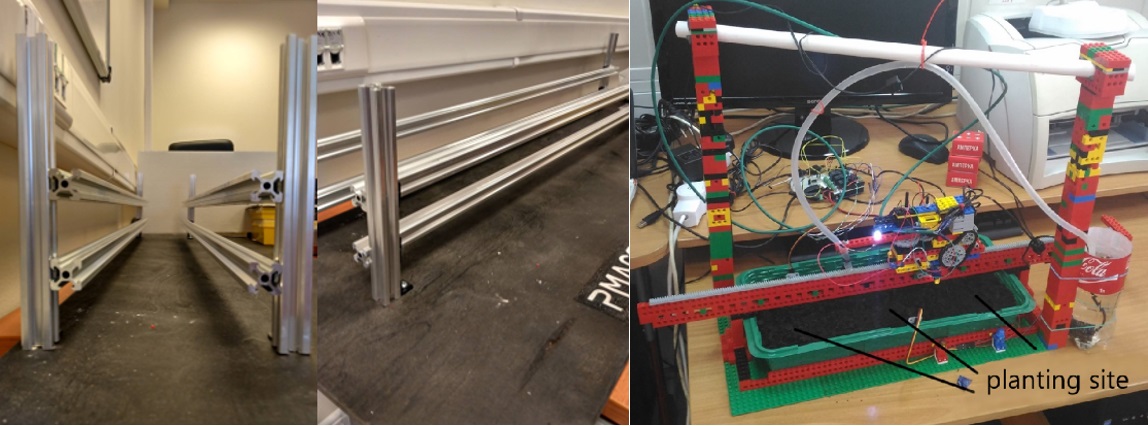
Система умного дома. Целью данного проекта является создание системы «умный дом». Особенностью данной системы будет являться предоставление доступа к устройствам только тех пользователей, которым предоставлены на это права. Распознавание пользователей проводится специальной системой распознавания лиц. Использование платы ПЛИС в проекте позволит увеличить скорость взаимодействия пользователя с управляемыми устройствами. Авторы: Татьяна Чибисова, Никита Типун, Шамиль Магомедов. Руководитель: Лежнев Евгений.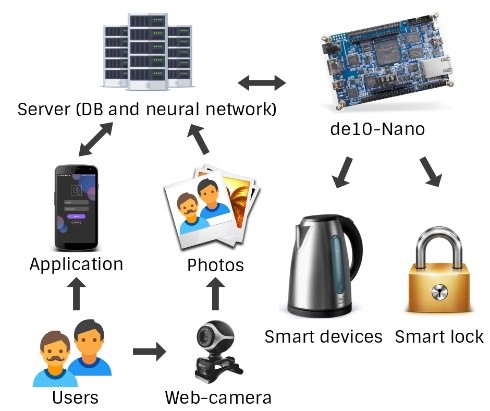
Сферический робот. Целью проекта является аппаратно-программный комплекс для реализации сферического робота. Проект состоит из двух основных частей: аппаратной и программной. Аппаратное обеспечение состоит из двигателей, датчиков обратной связи для управления двигателями, датчиков расстояния, гироскопа, акселерометра. Программная часть реализована на плате FPGA DE10-Nano, на которой выполняются расчеты для управления двигателями и датчиками. Также разработано мобильное приложение для ручного управления устройством. Авторы: аспиранты ДКИ МИЭМ Лежнев Евгений и Американов Александр. Руководитель: Романов Александр.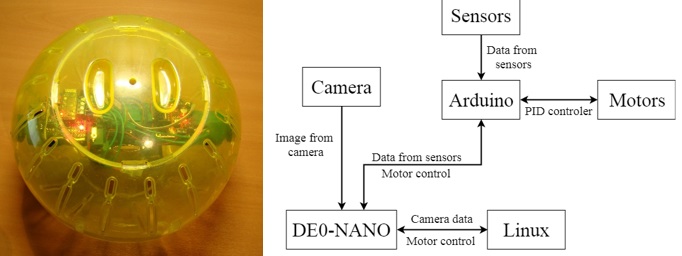
Робот Гид. Целью этого проекта является разработка прототипа робота гида для проведения различных экскурсий и использования в образовательных целях. Процесс разработки делится на две основные части: серверная часть и роботизированная часть. Серверная часть служит интерфейсом взаимодействия между оператором и роботизированной частью. На стороне сервера оператор создает задачу, которая добавляется в очередь для выполнения, после чего она переносится в роботизированную часть для непосредственного выполнения. Робот начинает движение от текущего местоположения к месту назначения, избегая столкновений со статическими и динамическими объектами. После достижения пункта назначения робот воспроизводит информацию про экспонат. Управление моторами и датчиками робота осуществляется платой ПЛИС. Данный проект является продолжением ВКР на 4 курсе. Авторы: Арцыбашева Вероника и Дмитриев Сергей. Руководитель: Романов Александр .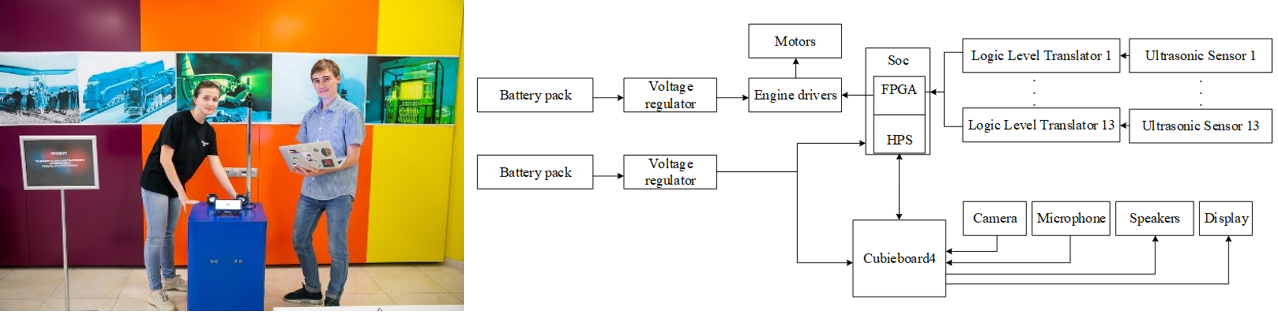
Система отслеживания человеческих лиц на видео-потоке. Проект посвящен использованию сложных нейронных сетей в ПЛИС для решения задачи обработки видеопотока и обнаружения объектов различного типа в кадре. В качестве примера планируется использовать нейронную сеть на основе MobileNet_v1. Прототип распознает присутствие людей в кадре. Также планируется добавить несколько альтернативных моделей с высокой точностью обнаружения (распознавание автомобилей и животных в кадре). Совместный проект ИППМ РАН (студ. – Кустов Александр; рук. – д.т.н., с.н.с. Соловьев Роман) и МИЭМ (студ. – Ларюшкин Илья, Новоселов Георгий; рук. – к.т.н., доц. Романов Александр).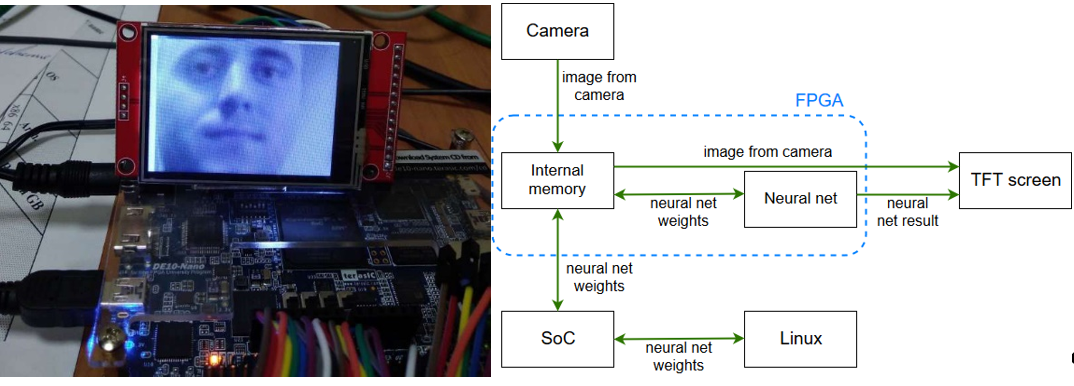
Представили достойные проекты, но не прошли в региональный финал:
Прототипирование многопроцессорных систем на базе ПЛИС. Проект представляет собой прототип сети на кристалле (СтнК), основанный на простых софт-процессорных ядрах SchoolMIPS с использованием ПЛИС. Процессорные ядра генерируют пакеты и передают их между собой. Предлагаемое решение позволяет, изменяя конфигурацию сети (такие параметры, как тип топологии, размер буферов, и т.д.), собирать различную статистику (например, загруженность сети). Данный проект найдет свое применение в области проектирования систем на кристалле. Также стоит отметить, что благодаря программно-аппаратной симуляции, аппаратный прототип увеличит скорость моделирования СтнК в сотни раз по сравнению с программным моделированием HDL. Данный проект является продолжением ВКР на 4 курсе и, не смотря на неудачу на конкурсе, активно развивается. Автор: Завьялов Андрей. Руководитель: Романов Александр.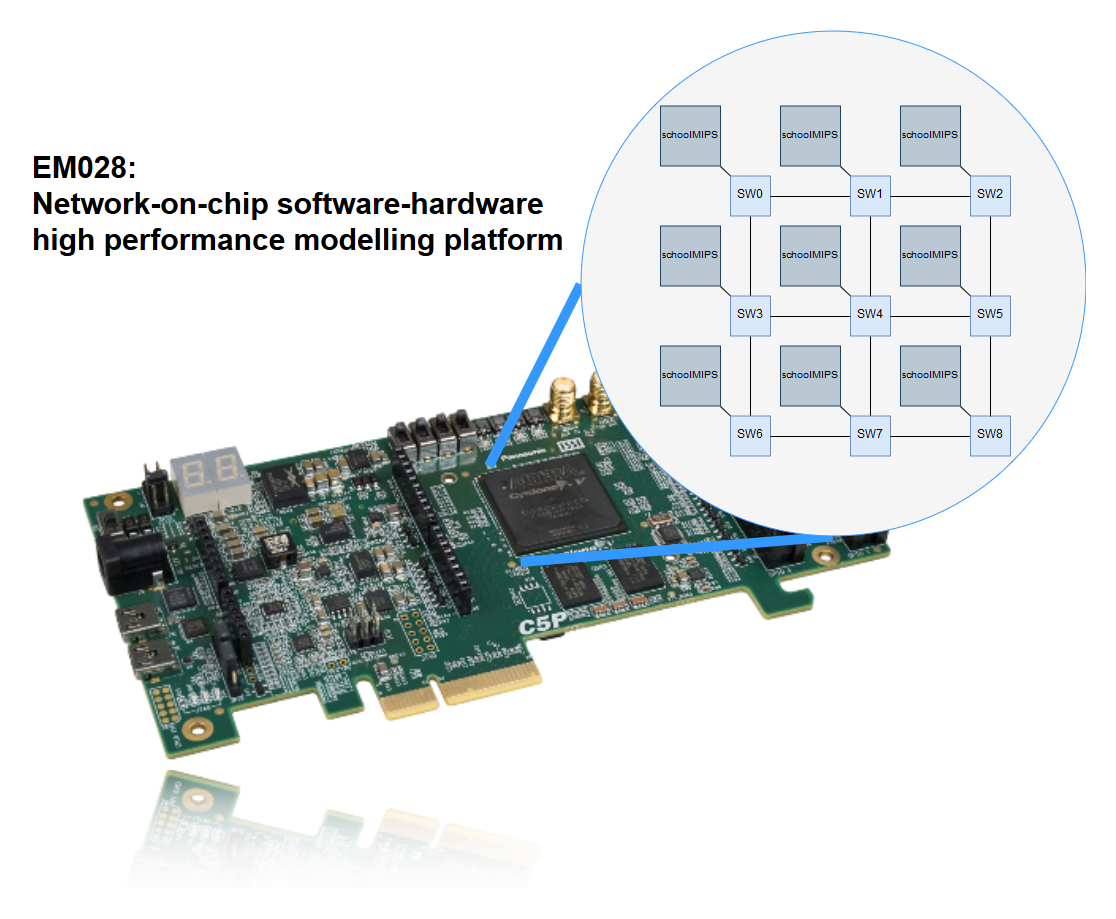
Аппаратный ускоритель для классификации текстов. Целью проекта является разработка аппаратного ускорителя для определения категории текстов, на базе ПЛИС. Классификация текстов является сложной вычислительной задачей, разрабатываемая система позволила бы увеличить скорость вычислений и, следовательно, сократить количества времени, затрачиваемого на решение задачи класификации. Данный проект является продолжением ВКР на 4 курсе. Автор: Кузнецов Никита. Руководитель: Романов Александр.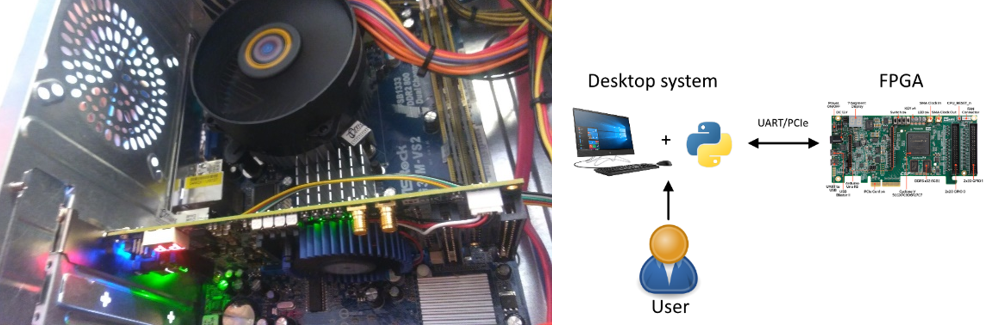
Система управления рукой манипулятором . Целью проекта является разработка системы управления для распечатанного на 3D принтере манипулятора с четырьмя степенями свободы. Управление сервоприводами осуществляется с помощью платы Terrasic DE10-Lite и комплекта Terrasic Servo Motor Kit. DE10-Lite позволяют осуществлять параллельное управление большим количеством сервомоторов. Для управления манипулятором используется акселерометр, встроенный в DE10-Lite, потенциометры, выполненные в виде пары джойстиков, и кнопок. Этот проект является продолжением разработки, выполненной в результате проекта на 3 курсе. Авторы: Авдеев Артем, Кленевский Георгий, Колесник Павел. Руководители: Романов Александр, Ролич Алексей.

Аспирант НИУ ВШЭ МИЭМ Американов Александр Александрович получил сертификат за активное участие в обсуждении проектов, и получил в подарок от организаторов плату DE 10 PLUS.

Американов Александр Александрович
Учебная лаборатория систем автоматизированного проектирования: Стажер-исследователь
Лежнев Евгений Владимирович
Учебная лаборатория систем автоматизированного проектирования: Стажер-исследователь
Ролич Алексей Юрьевич
Ведущий инженер учебной лаборатории 3Д-визуализации и компьютерной графики
Романов Александр Юрьевич
Департамент компьютерной инженерии: Доцент