Разработка системы управления робота в среде симуляции с использованием ROS
В настоящее время сфера робототехники становится все более популярной благодаря внедрению роботов в процессы производства и в другие сферы жизни человека. Среди всех проблем особенно остро стоит вопрос о тестировании (о дистанционном тестировании и моделировании функционалов робота) в той или иной среде симуляции.
Проект нацелен на исследование ряда сред симуляции, совместимых с ROS, для нахождения наиболее подходящей среды для решения конкретной задачи.

Цель проекта:
Целью проекта является изучение наиболее популярных и востребованных сред моделирования, совместимых ROS, и составления сравнительной таблицы по ним, исходя из которых пользователю будет легче определиться какая из сред является более подходящей для решения его задачи. А также компиляция пользовательской документации для работы в выбранной среде моделирования.
Результатом проекта планируется таблица с перечнем различных сред моделирования, в которой будут описаны описаны основные параметры (характеристики) среды моделирования, также к каждой из сред будет составлена документация.
Заказчик, в чьих интересах создание данного проекта:
Заказчиком проекта является Московский Институт Электроники и Математики.
Планируемые результаты проекта:
- Сравнительная таблица сред моделирования, составленная по результатам изучения среды участниками проекта. Данная таблица облегчит выбор из множества сред моделирования, которые могут быть использованы в следующих проектах лаборатории САПР МИЭМ.
- Пользовательская документация к каждой изученной в проекте среде моделирования, которая поможет участниками будущих проектов лаборатории САПР МИЭМ.
- База примеров для каждой среды моделирования, которая сможет помочь участникам проектов УЛ САПР МИЭМ освоиться в незнакомой среде моделирования и понять ее концепции.
Текущие результаты:
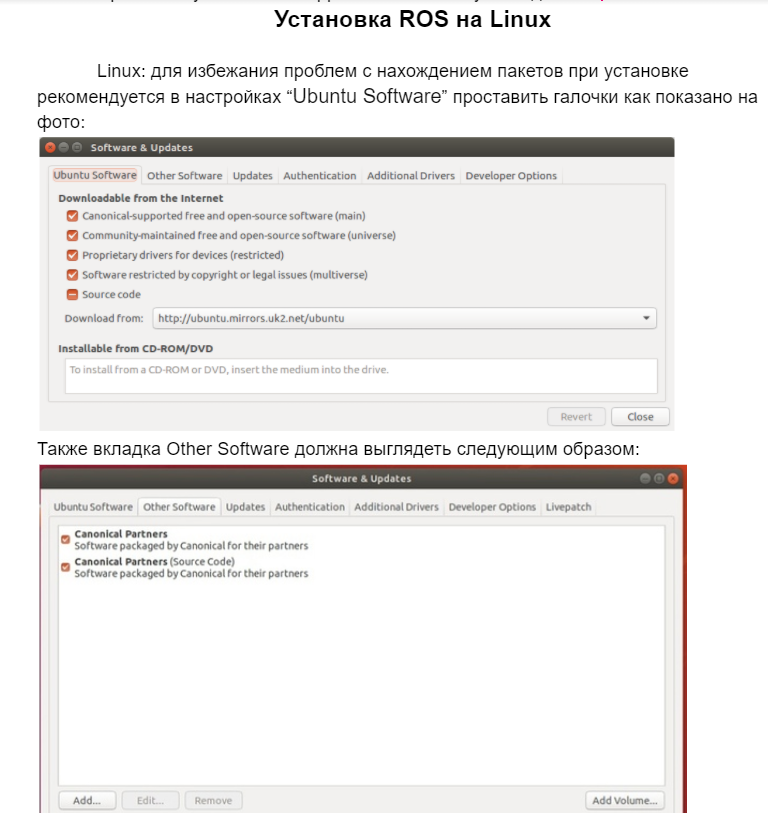
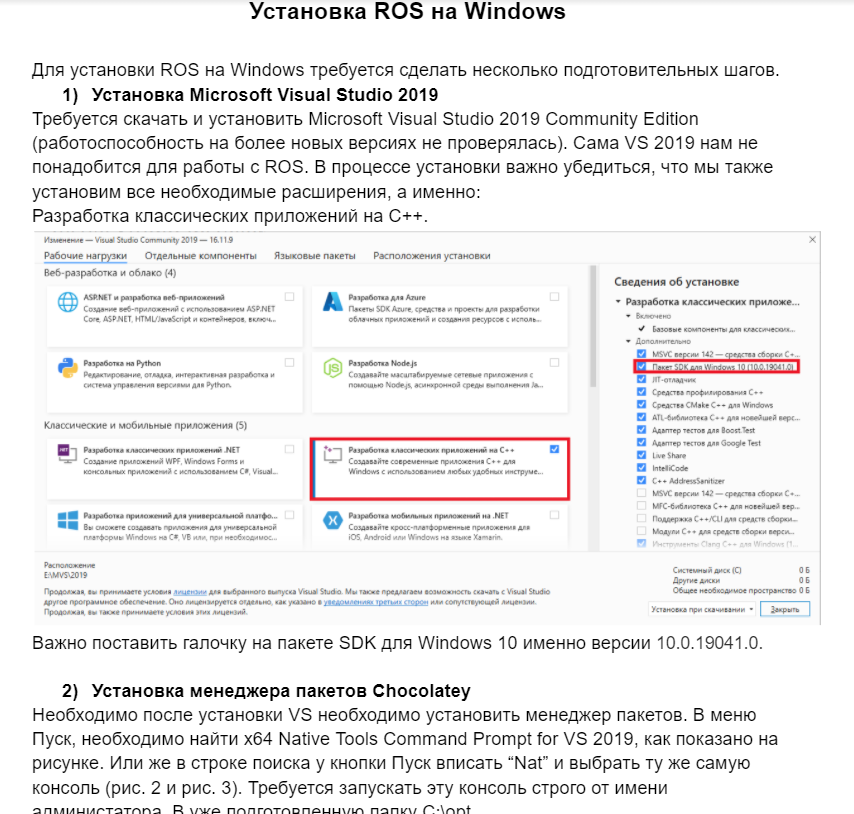
В настоящее время активно изучается среда моделирования Coppelia Sim, описаны проблемы, которые пользователь может встретить в процессе установке и/или эксплуатации данного ПО. В данный момент участники трудятся над созданием базы примеров к данной среде симуляции, написанием пользовательской документации и заполнением таблицы, в которой будет приведено сравнение всех рассмотренных сред моделирования.
В ближайшее время будет закончена работа с Coppelia Sim, все материалы и примеры будут выложены в Gitlab проекта, и команда приступит к изучению среды моделирования Gazebo.
Команда проекта:
Чевкин Егор Дмитриевич - стажер
Юфанов Артем Игоревич - стажер
Маркин Андрей Павлович - стажер
Руководители проекта

Департамент компьютерной инженерии: Старший преподаватель

Департамент компьютерной инженерии: Доцент
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.