Подвижная платформа для животных с нарушениями двигательного аппарата
Цель проекта:
Целью проекта является создание прототипа конструкции коляски, оснащенной электрической частью, для собак с нарушениями двигательного аппарата (отсутствуют конечности, нарушения в спинном мозге).


Коляска, оснащенная электрической частью, нужна для снижения нагрузки на позвоночник животного, что должно привести к удлинению срока жизни и улучшению ее качества.
Текущий результат
- Исследован рынок колясок для собак спинальников. Проведен анализ плюс и минус различных моделей и выбран оптимальный вариант с учетом цены, качества, удобства для собаки и доступности.
- Выбраны и закуплены материалы для физического прототипа
- выбраны материалы для корпуса (трубки, уголки, колеса, способы фиксации - ремни и шлейки)
- исследованы и выбраны двигатели (После исследования были выбраны шаговые двигатели, так как они позволяют прокручивать колеса в разряженном состоянии, подходят для собак с большим весом, а также не нуждаются в первичном достаточно значительном импульсе)
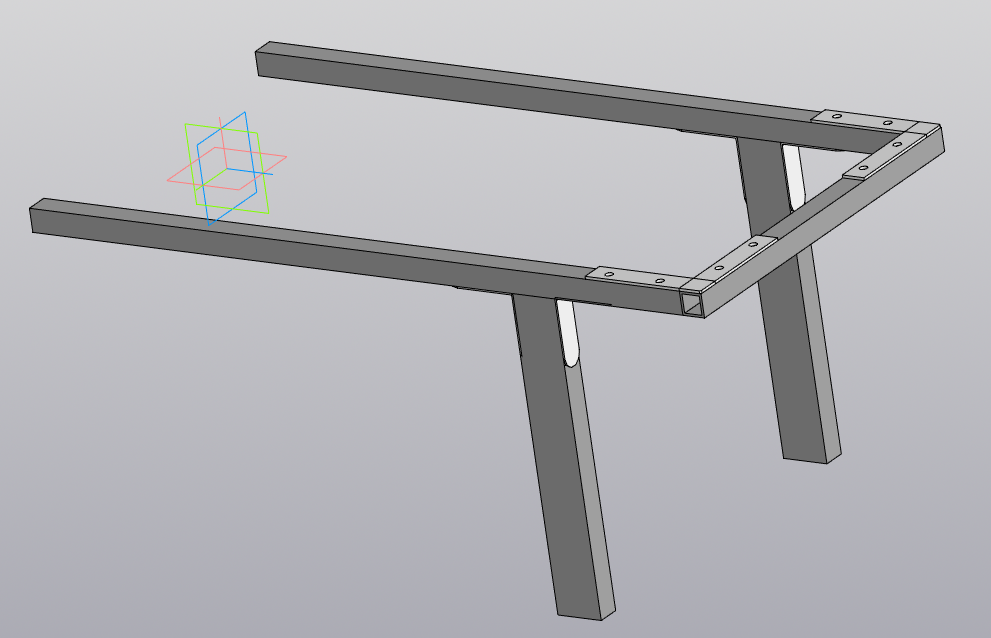
- Создана 3d-модель коляски в Компас-3D, не включающая элементов для изменения размера корпуса. (т.к. пока не выбран способ изменения высоты и длины коляски - связано с ограниченностью реализации).
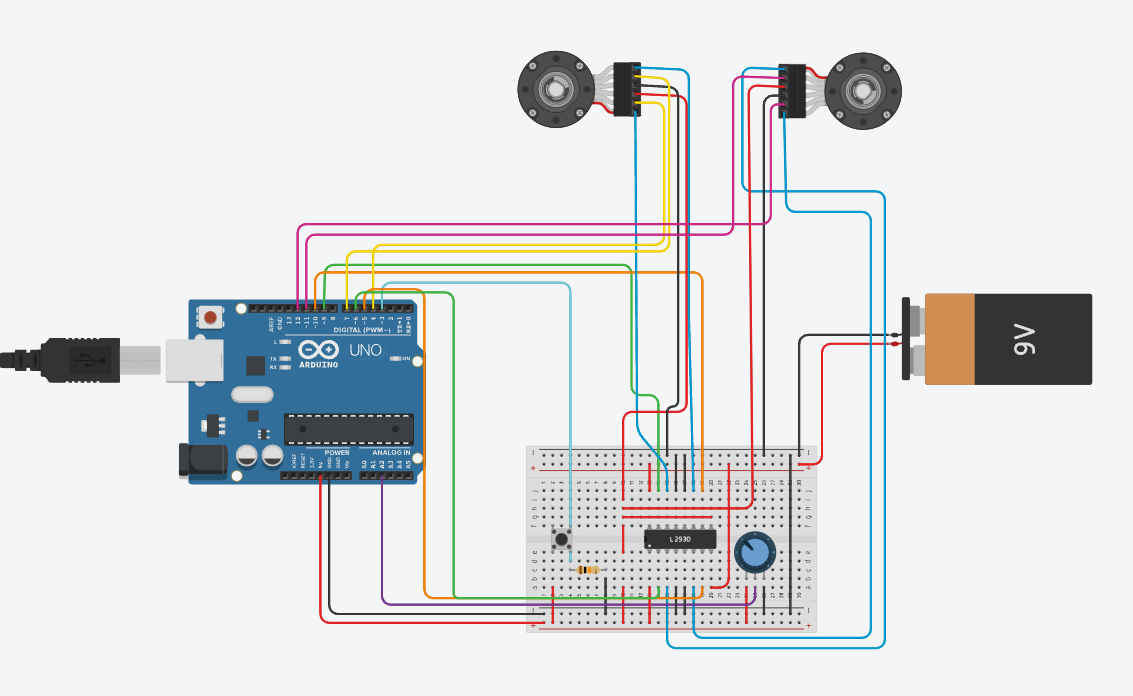
- Создана первичная электрическая схема устройства в Tinkercad на основе Arduino, подлежащая доработке. Сейчас смена направлений движения двигателей зависит от кнопки, а за включение/выключение и регулирование скорости отвечает потенциометр, так как в данный момент ведется разработка идеи о получении данных о характере движения собаки.
- Изучены способы получения информации о движении с помощью гироскопа-акселерометра и энкодера. На данный момент идёт обсуждение о вариантах их применения в проекте.
На данный момент идет исследование и обсуждение идеи о способе контроля за остановкой движения системы собака-коляска. В ближайшее время планируется создание физического корпуса коляски, обсуждаются способы укрепления конструкции.
Команда проекта:
{kind=link}
{kind=link}
{kind=link}
Руководители проекта

Департамент компьютерной инженерии: Старший преподаватель

Департамент компьютерной инженерии: Доцент
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.