Mobile platform for animals with locomotor disorders
Objective of the project:
The aim of the project is to create a prototype design of a wheelchair equipped with an electric part for dogs with locomotor disorders (missing limbs, disorders in the spinal cord).


A stroller equipped with an electric part is needed to reduce the load on the animal's spine, which should lead to a longer life span and an improvement in its quality.
Current results:
- The market of wheelchairs for spinal dogs has been studied. An analysis of the plus and minus of various models was carried out and the best option was chosen taking into account price, quality, convenience for the dog, and accessibility.
- Selected and purchased materials for the physical prototype
- selected materials for the body (tubes, corners, wheels, fixing methods - belts and harnesses)
- motors were researched and selected (After research, stepper motors were chosen, as they allow the wheels to be rotated in a discharged state, are suitable for dogs with a large weight, and also do not need a sufficiently significant initial impulse)
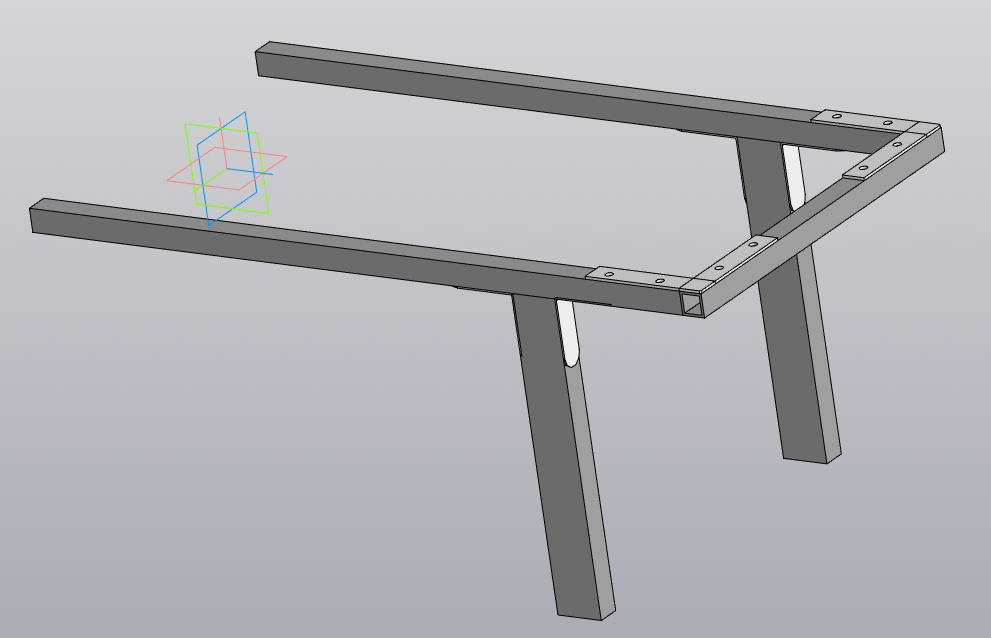
- A 3d model of a stroller was created in Compass-3D, which does not include elements for changing the size of the body. (because the method of changing the height and length of the stroller has not yet been chosen - due to the limited implementation).
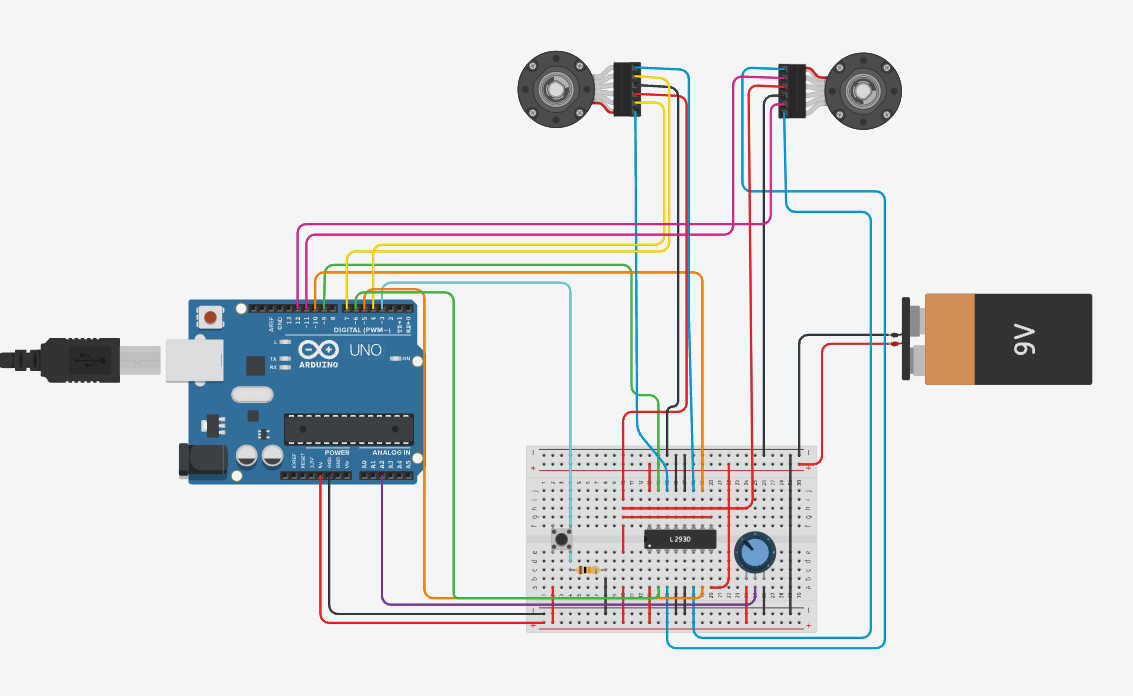
- The primary electrical circuit of the device was created in Tinkercad based on Arduino, to be finalized. Now the change in the direction of movement of the motors depends on the button, and the potentiometer is responsible for turning on / off and regulating the speed since at the moment an idea is being developed to obtain data on the nature of the movement of the dog.
- Methods for obtaining information about movement using a gyroscope-accelerometer and an encoder are studied. At the moment, there is a discussion about the options for their use in the project.
At the moment, research and discussion of the idea of a method for controlling the stoppage of the movement of the dog-carriage system is underway. In the near future, it is planned to create a physical body of the stroller, and ways to strengthen the structure are being discussed.
Customer:
Romanova Irina Ivanovna
The project team





Have you spotted a typo?
Highlight it, click Ctrl+Enter and send us a message. Thank you for your help!
To be used only for spelling or punctuation mistakes.